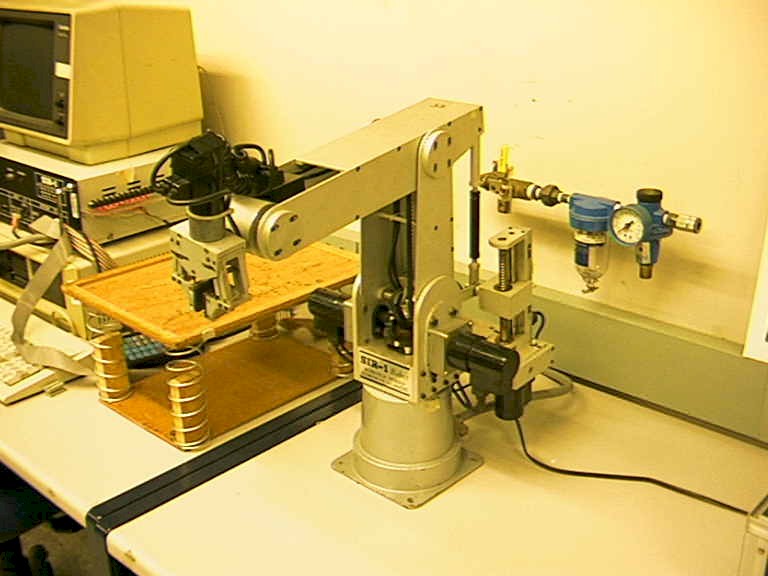
SIR 1 Jointed Arm Coordinate Robot