Robotic exoskeletons is becoming more popular in use for augmenting human performance or rehabilitating gait disorders.
Assistance to lower body joints such as hip, knee, and ankle is paramount in assisting ambulatory motions such as walking.
Hip muscles generate substantial torques for both flexion and extension with similar magnitudes during walking and consume the greatest percentage of the total human muscle energy expenditure [1]
Exoskeleton torque assistance to hip is expected to reduce the metabolic cost of human walking to a great degree.
Exoskeletons have been designed to assist hip in either the flexion [2] or extension direction [3] considering that assisting only one direction can greatly simplify the design and actuation of some exoskeletons (e.g. cable driven or soft actuator driven).
However, there are no clear or conclusive evidences on either flexion or extension assistance is better.
This study investigates and compares the effects of hip assistance in these two directions and aims to provide clues on which one is more efficient in reducing metabolic cost of transport (COT).
Methods
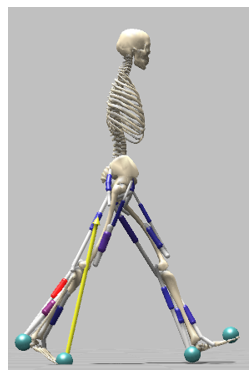
We employed a subject musculoskeletal model that was actuated by sixteen Hill-type muscle tendon units, as shown in Fig. 1.
To simulate walking, the muscle excitations were generated through muscle reflex control whose parameters were optimized with a Covariance Matrix Adaptation Evolutionary Strategy (CMA-ES) method. The optimization was conducted with the SCONE software [4], which used OpenSim[5] to execute single shoot forward dynamics simulations of walking within each optimization iteration.
The objective function of this optimization was a weighted combination of multiple motion characteristics, including metabolic COT calculated from a muscle energetics model [6], walking speed range, and penalties for falling, injury, and joint limit violations.
An optimization was first performed to generate a normal walking motion with Self Selected Speed (SSS). Then idealized hip joint assistance torques (flexion/extension) were directly added to the hip joint for exoskeleton simulations.
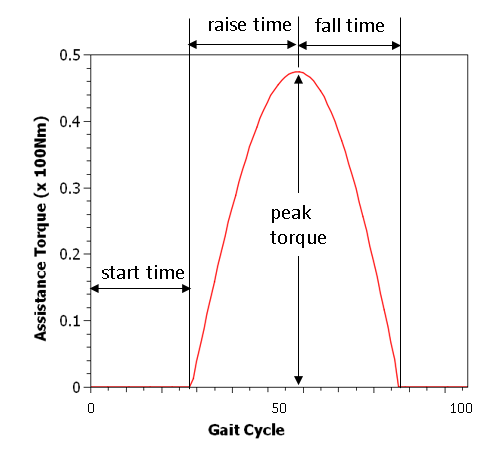
The assistance torque profile was assumed to take the form of a raise-peak-fall curve (Fig. 1) [7] and the parameters include the offset time, raise time, fall time, and the peak torque.
For flexion assistance, the reference starting time (t=0) for offset is at the middle stance phase whereas for extension the reference time is at the beginning of the swing phase.
The peak torque limit was set to be 50 N/m.
During optimizations, these assistance parameters were optimized together with the muscle reflex control parameters such that adaptations of muscle reflex and gait were considered.
Fig.1 Left: The human subject musculoskeletal model; Right: assistant torque profile described by a raise-peak-fall curve with multiple parameters.
Results and Discussion
Fig. 2 shows animations of walking at SSS with and without exoskeleton hip assitances.
Fig.2 From left to right: animations of walking without exoskeleton assitance, with hip extension assistance, and with hip flexion assistance.
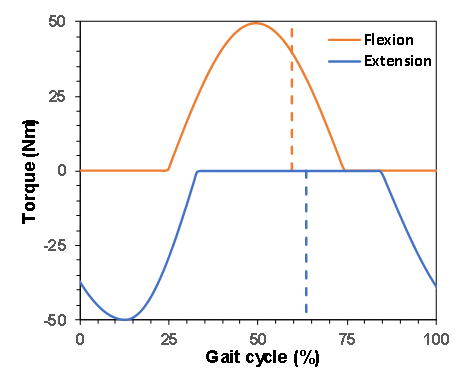
Table 1 compares gait characteristics of normal walking with those of assisted walking, for which the predicted optimal torque profiles are shown in Fig. 3.
Table 1 Comparison of gait characteristics for normal and assisted walking. The unit for COT is ; is the hip angle range. Fig. 3 Predicted optimal hip flexion and extension torque profiles. The gait cycle starts from the heel strike and dashed lines indicate the start of swing phases.
Main findings:
With assistance, the SSS increased by 16.7% and 9.7% for flexion and extension, respectively.
Flexion assistance changed the stride length (L) minimally but shortened the stride duration (D) (i.e. increased step frequency) whereas extension assistance increased step frequency further but decreased the stride length.
Flexion assistance increased the maximum hip flexion angle by and reduced the extension angle by .
The extension assistance also increased the hip flexion angle slightly (by ) and decreased the extension angle by .
In the latter case, the decrease in hip extension angle is likely caused by faster walking with a short stride and the absence of extension assistance during the late stance phase.
For both assistances, the COT decreased considerably, by 19.1% for flexion and 11.7% for extension.
Summary
We demonstrated a computational approach to evaluate the effectiveness of hip assistance to human walking and predicted gait adaptation and change of energetics.
We found that the hip flexion assistance performed better than hip extension assistance in terms of COT reduction and caused less changes of gait patterns (stride length and duration).
Significance
Designing wearable exoskeletons is often a trade-off process considering various factors such as power, actuation, cost, weight, and wearability.
Knowing how and when to apply assistance to a joint is critical for designing wearable exoskeletons.
Our study can provide guidelines for optimal hip actuation (e.g. timing and profiles) and help designers make informed decisions.
The method can also be extended to study assistance to other joints.
References
[1] Umberger and Rubenson, Exerc Sport Sci Rev, vol. 39, no. 2, pp. 59-67, 2011.
[2] Quinlivan et al., Sci. Robot, vol. 2, no. 2, pp. 1-10, 2017.
[3] Ding, et al., Science Robotics, vol. 3, no. 15, eaar5438, 2018.
[4] Geijtenbeek, J. of Open Source Softw., vol. 4, no. 38, p. 1421, 2019.
[5] Seth, et al., Procedia IUTAM, vol. 2, no. 0, pp. 212-232, 2011.
[6] Uchida et al., PloS one, vol. 11, no. 3, 2016
[7] Zhang et al., Science, vol. 356, no. 6344, pp. 1280-1284, 2017.