
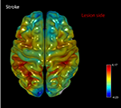
Optimizing Hand Rehabilitation Post-Stroke Using Interactive Virtual Environments
Funded by: National Institute of Child Health and Human Development (NICHD)
Grant: R01 HD58301, 03/01/09 - 05/31/22
The main goal of this project is to refine and optimize elements of the virtual reality-based training paradigms to enhance neuroplasticity and maximize recovery of function in the hemiplegic hand of patients who had a stroke.
PIs, Sergei Adamovich, Alma Merians, Eugene Tunik, A.M. Barrett
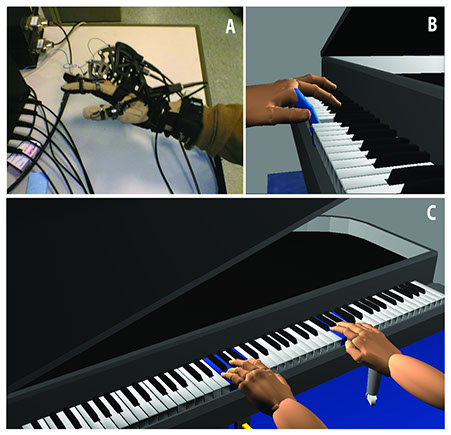
This application seeks funding to continue our on-going investigation into the effects of intensive, high dosage task and impairment based training of the hemiparetic hand, using haptic robots integrated with complex gaming and virtual reality simulations. A growing body of work suggests that there is a time-limited period of post-ischemic heightened neuronal plasticity during which intensive training may optimally affect the recovery of gross motor skills, indicating that the timing of rehabilitation is as important as the dosing. However, recent literature indicates a controversy regarding both the value of intensive, high dosage as well as the optimal timing for therapy in the first two months after stroke. Our study is designed to empirically investigate this controversy. Furthermore, current service delivery models in the United States limit treatment time and length of hospital stay during this period. In order to facilitate timely discharge from the acute care hospital or the acute rehabilitation setting, the initial priority for rehabilitation is independence in transfers and ambulation. This has negatively impacted the provision of intensive hand and upper extremity therapy during this period of heightened neuroplasticity. It is evident that providing additional, intensive therapy during the acute rehabilitation stay is more complicated to implement and difficult for patients to tolerate, than initiating it in the outpatient setting, immediately after discharge. Our pilot data show that we are able to integrate intensive, targeted hand therapy into the routine of an acute rehabilitation setting. Our system has been specifically designed to deliver hand training when motion and strength are limited. The system uses adaptive algorithms to drive individual finger movement, gain adaptation and workspace modification to increase finger range of motion, and haptic and visual feedback from mirrored movements to reinforce motor networks in the lesioned hemisphere. We will translate the extensive experience gained in our previous studies on patients in the chronic phase, to investigate the effects of this type of intervention on recovery and function of the hand, when the training is initiated within early period of heightened plasticity. We will integrate the behavioral, the kinematic/kinetic and neurophysiological aspects of recovery to determine: 1) whether early intensive training focusing on the hand will result in a more functional hemiparetic arm; (2) whether it is necessary to initiate intensive hand therapy during the very early inpatient rehabilitation phase or will comparable outcomes be achieved if the therapy is initiated right after discharge, in the outpatient period; and 3) whether the effect of the early intervention observed at 6 months post stroke can be predicted by the cortical reorganization evaluated immediately after the therapy. This proposal will fill a critical gap in the literature and make a significant advancement in the investigation of putative interventions for recovery of hand function in patients post-stroke. Currently relatively little is known about the effect of very intensive, progressive VR/robotics training in the acute early period (5-30 days) post-stroke. This proposal can move us past a critical barrier to the development of more effective approaches in stroke rehabilitation targeted at the hand and arm.




2021 Neuromotor Behavior and Neurorehabilitation Lab | New Jersey Institute of Technology





